Funding: NASA STTR, Contract #80NSSC24CA028
Period of Performance (Phase II): December 2023 – December 2025
Prime Contractor: TRACLabs Inc. (PI: Dr. David Kortenkamp)
Subcontractor: Texas A&M University (PI: Daniel Selva)
Overview
Future long-duration exploration missions will feature extended communication delays with ground control—up to 46 minutes round-trip for Mars—and space habitats such as Gateway and lunar bases are expected to operate in an uncrewed or dormant state for extended periods. The Multi-Agent Anomaly Resolution System (MaARS) addresses these challenges by integrating three key technologies: automated fault detection, diagnostics, and recovery (AFDD-R); a virtual assistant (VA) that mediates crew and ground controller interactions with the AFDD-R systems; and robotic caretakers that can perform inspections and repairs during dormancy. A proof-of-concept demonstration was performed using a Gateway life support simulation (BioSim) and simulated IVA and EVA robotic caretakers.
Technical Approach
MaARS integrates two complementary AFDD-R approaches, each with distinct strengths:
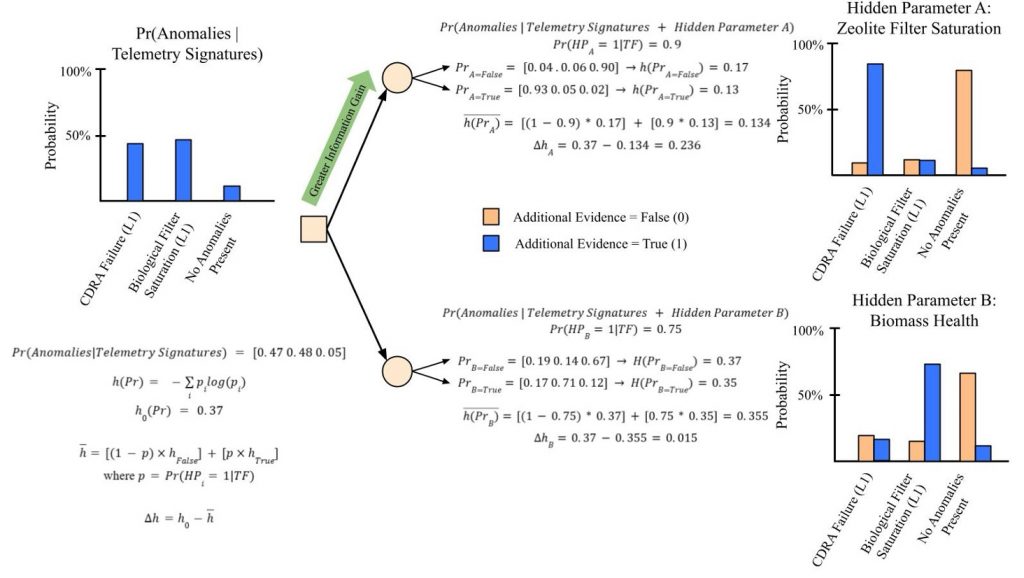
- Bayesian AFDD-R: A probabilistic reasoning framework that computes the likelihood of each known fault given telemetry evidence, supports iterative diagnosis by incorporating additional evidence, and suggests the next most informative measurement to reduce diagnostic uncertainty (via information gain / entropy minimization). The Bayesian network was modeled for the HERA ECLSS and adapted for Gateway, containing nodes for anomalies, observable parameters, and hidden variables.
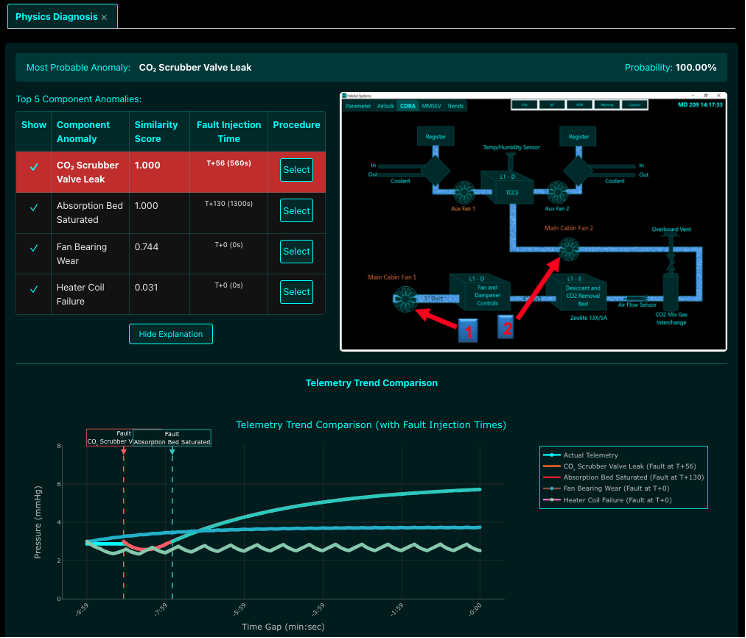
- Physics-based AFDD-R: A framework that embeds first-principles physical models to simulate fault hypotheses and rank them by similarity to observed telemetry (using RMSE). Applied to a CO₂ removal system case study with 7 fault scenarios, the method achieved 70% Hits@1 and 100% Hits@2 accuracy at realistic noise levels. The approach can detect unknown faults not enumerated in a database—a key advantage over the Bayesian approach.
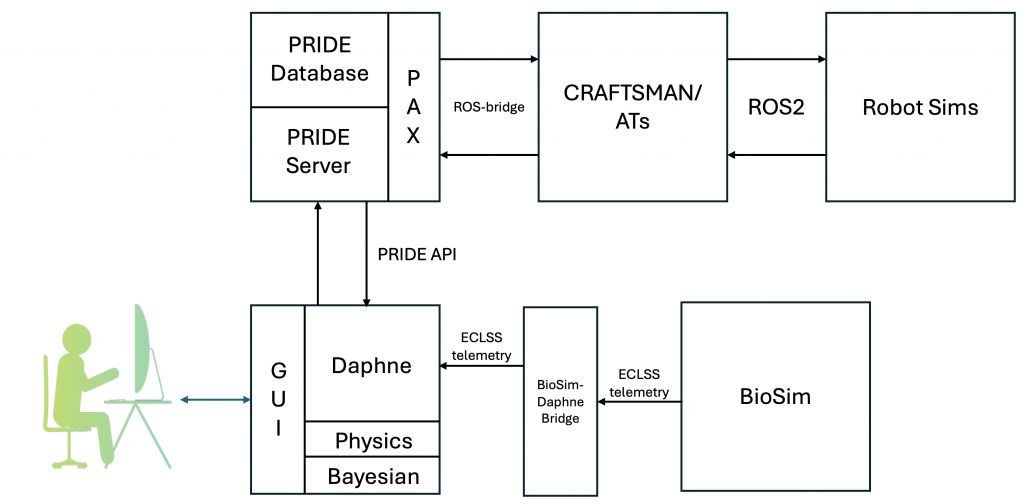
The Daphne-AT virtual assistant serves as the unified interface between the AFDD-R systems, the robotic caretakers, and the user. Daphne monitors the telemetry feed from BioSim, presents anomalies and ranked diagnoses to the operator, and autonomously searches and launches PRIDE procedures to direct robots to inspect or repair faulty components. Results from robotic inspections are fed back to Daphne via PRIDE Shared Variables. Two proof-of-concept scenarios were demonstrated: a CO₂ removal system failure requiring an IVA robot to replace a zeolite filter, and a pressure leak requiring an EVA robot to inspect the habitat hull.
Key Findings
The project demonstrated that combining multiple AFDD-R approaches allows their complementary strengths to be balanced: the Bayesian system excels at interpreting uncertain multi-fault data and reasoning about what evidence to collect next, while the physics-based system can reason from first principles about potentially unknown faults without requiring prior enumeration. The project also produced guidelines for next-generation procedure systems, emphasizing the need for semi-autonomous operation from a single procedure document, seamless integration with robotic control systems via Affordance Templates, and a full-featured API enabling external systems (such as VAs) to interact with the procedure platform programmatically.
Team
TRACLabs (Prime): Dr. David Kortenkamp (PI), Dr. Michael Lanighan, Seth Gee, Scott Bell
Texas A&M (Subcontract PI): Daniel Selva
Graduate Students: Kazuki Toma, Joshua Elston, Mahima Ganni
Publications
- J.T. Elston, K. Toma, D. Kortenkamp, and D. Selva. A Bayesian Framework for Human-Agent Collaborative Fault Diagnosis in Space Habitats. 2026 IEEE Aerospace Conference. March 2026.
- K. Toma, J.T. Elston, D. Kortenkamp, and D. Selva. Initial Study of a Physics-Based Virtual Assistant for Real-Time Fault Diagnosis in Space Habitats. 2026 IEEE Aerospace Conference. March 2026.
- K. Toma, J. Elston, D. Kortenkamp, and D. Selva. Development of a Physics-based Diagnosis Model and Digital Twin Simulation of a Space Habitat for End-to-end Autonomous Anomaly Resolution. 54th International Conference on Environmental Systems (ICES), 2025.